|
Locus No Pilotus
Project of four first grade MIPT DAFE/RSE students (for engineering practical work in the second semester) in Qt C++
|
|
Locus No Pilotus
Project of four first grade MIPT DAFE/RSE students (for engineering practical work in the second semester) in Qt C++
|
Класс, который позволяет анимировать движение робота More...
#include <flying_robot.h>
Public Member Functions | |
| FlyingRobot ()=default | |
| FlyingRobot (gui::Trajectory *trj) | |
| Инициализирует новый экземпляр FlyingRobot. | |
| void | Draw (QCustomPlot *plot) override |
| Отрисовывает png картинку | |
| gui::Trajectory * | GetTrajectory () const |
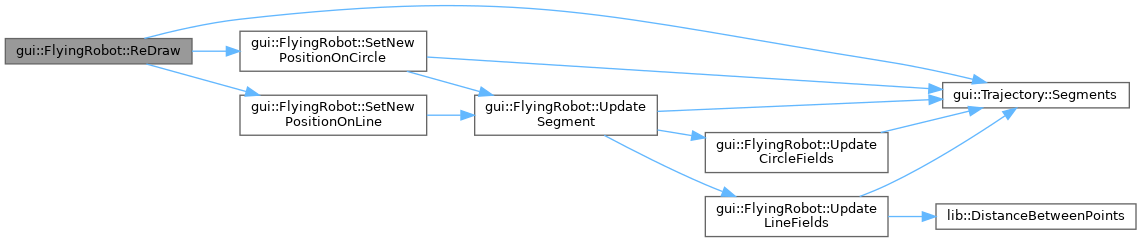
| void | ReDraw (QCustomPlot *plot) |
| Эта функция нужна для того, чтобы обновлять позицию картинки на полотне | |
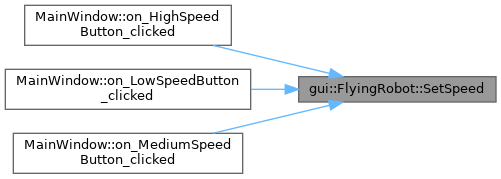
| void | SetSpeed (SpeedOfRobot speed) |
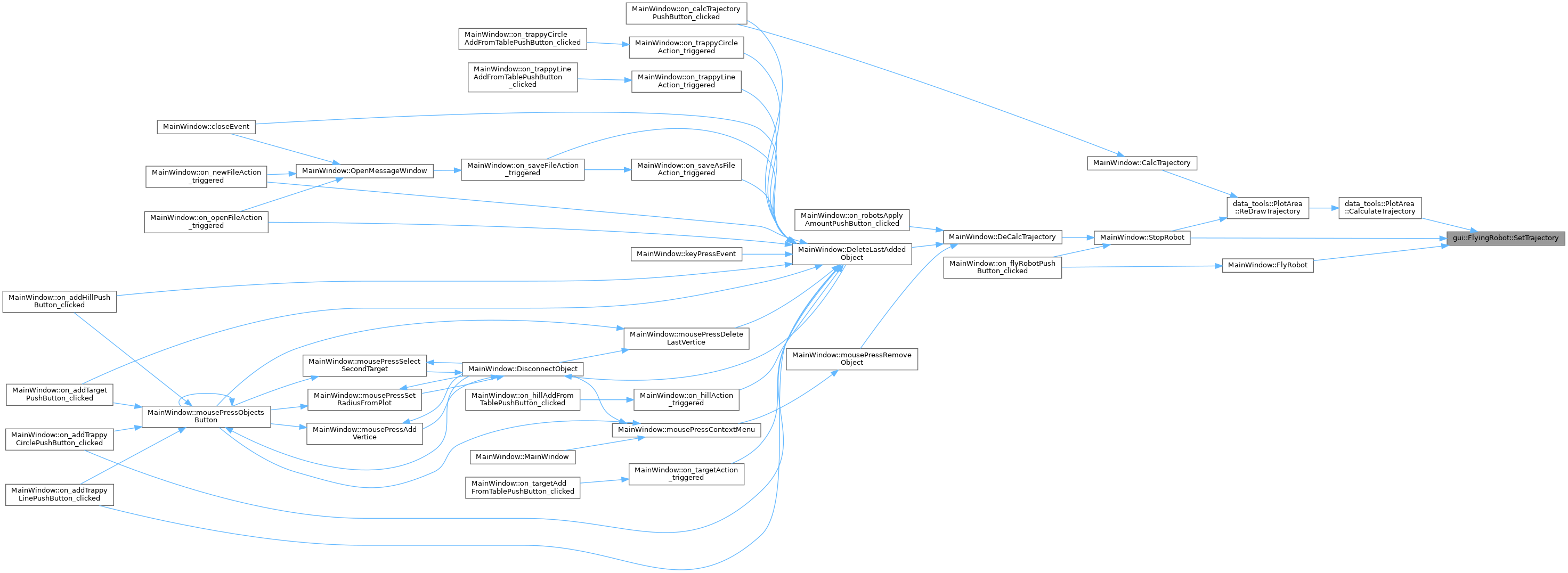
| void | SetTrajectory (gui::Trajectory *trj) |
Private Member Functions | |
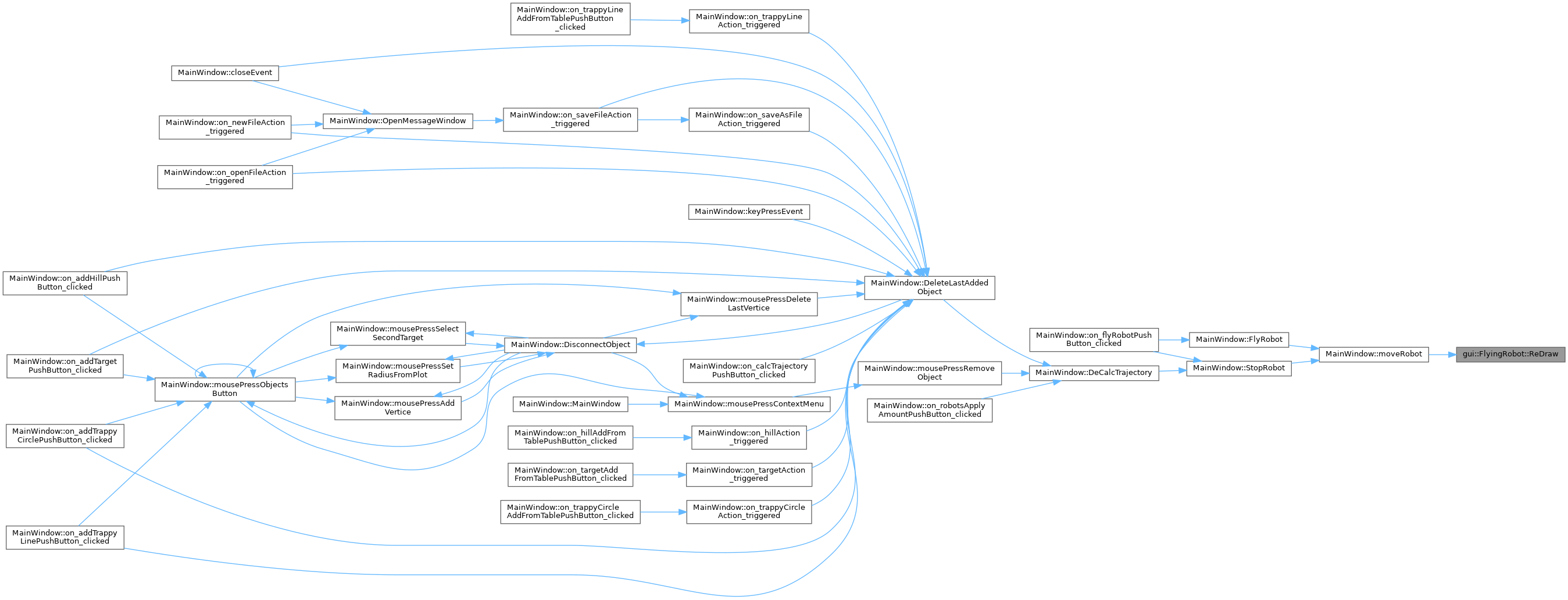
| void | SetNewPositionOnCircle () |
| Обновляет текущее положение точки на окружности | |
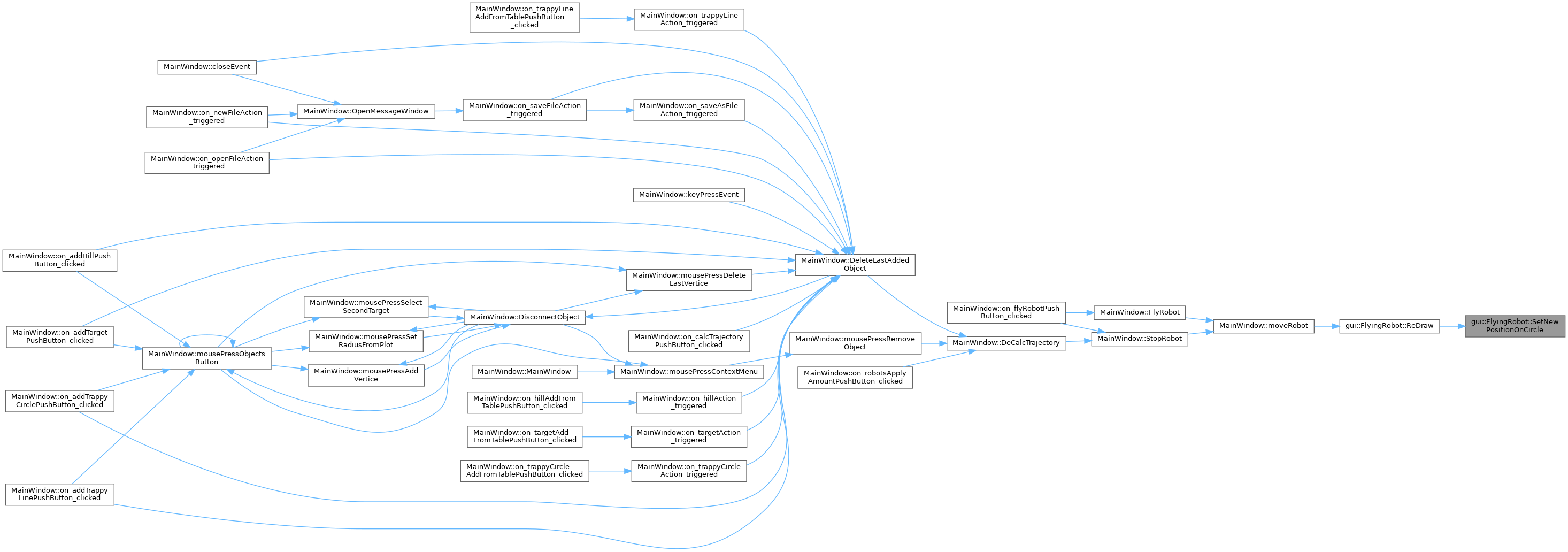
| void | SetNewPositionOnLine () |
| Обновляет текущее положение точки на линии | |
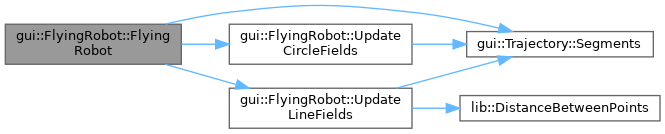
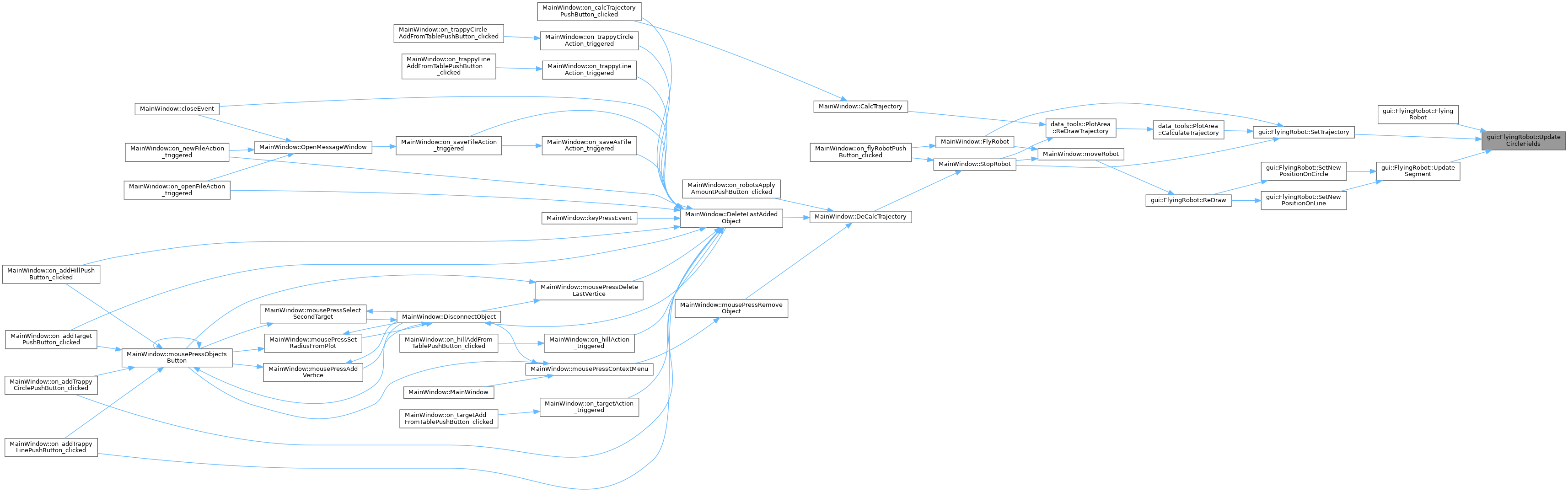
| void | UpdateCircleFields () |
| Обновляет поля curr_angle_on_circle_, clockwise_ и distribution_of_angle_. | |
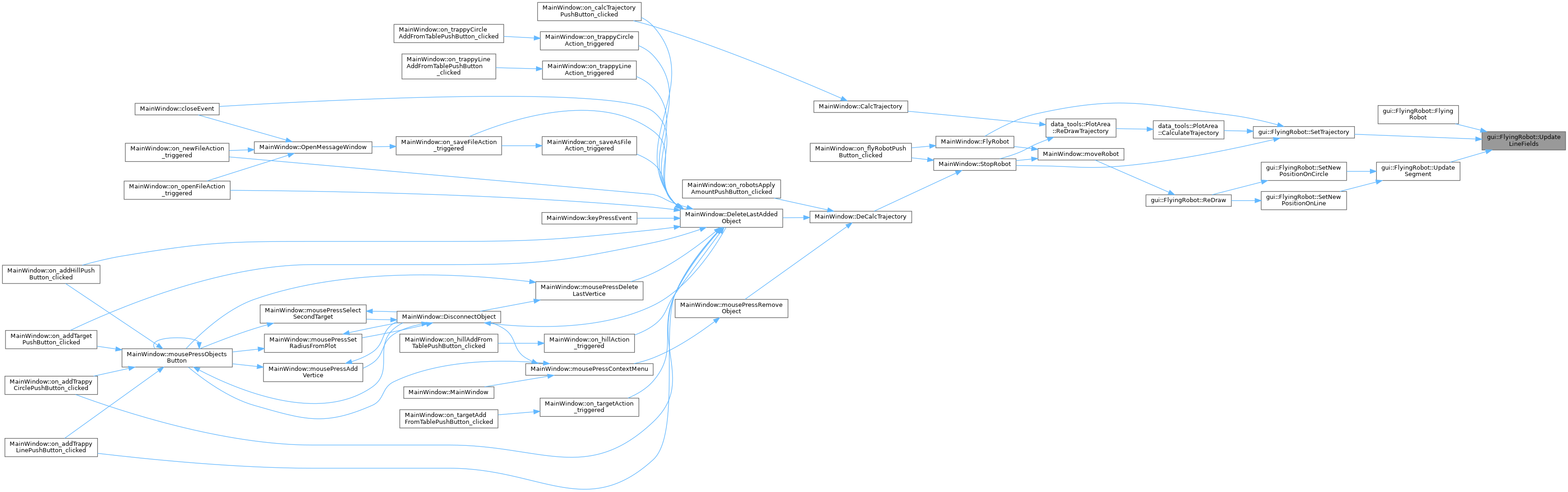
| void | UpdateLineFields () |
| Обновляет поля cos_of_line_ и sin_of_line_. | |
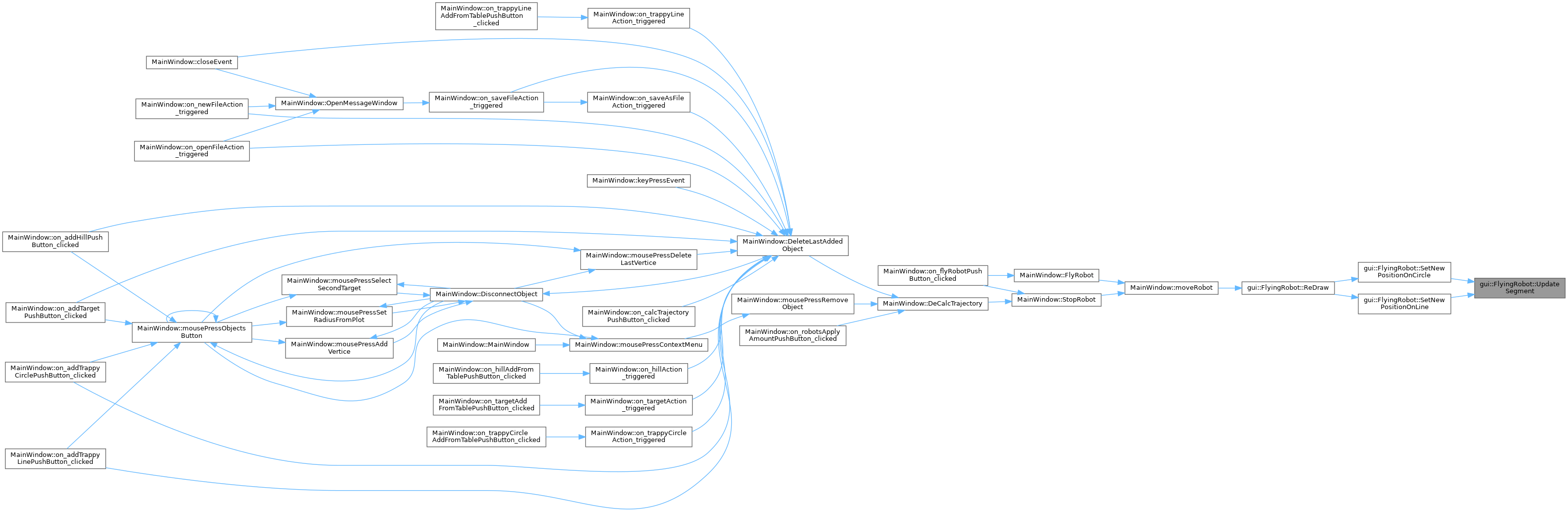
| void | UpdateSegment () |
| Берет следующий Segment, обновляя приватные поля | |
Private Attributes | |
| bool | clockwise_ |
| double | cos_of_line_ |
| int | count_of_partitions_ |
| double | curr_angle_on_circle_ |
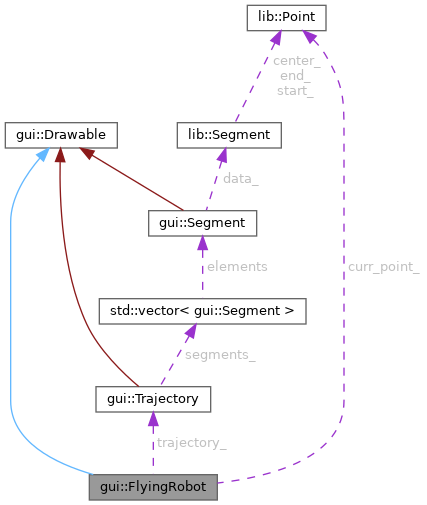
| lib::Point | curr_point_ |
| double | distribution_of_angle_ |
| QCPGraph * | graph_ {nullptr} |
| size_t | index_of_segment_ = 0 |
| double | line_const_ |
| double | sin_of_line_ |
| SpeedOfRobot | speed_ = SpeedOfRobot::Medium |
| gui::Trajectory * | trajectory_ |
Класс, который позволяет анимировать движение робота
Представляет из себя png картинку, которая движется по траектории
|
default |
|
inline |
Инициализирует новый экземпляр FlyingRobot.
| gui::Trajectory | траектория |
|
overridevirtual |
Отрисовывает png картинку
| plot | указатель на полотно |
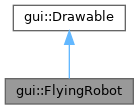
Implements gui::Drawable.

|
inline |
| void gui::FlyingRobot::ReDraw | ( | QCustomPlot * | plot | ) |
Эта функция нужна для того, чтобы обновлять позицию картинки на полотне
| plot | указатель на полотно |
|
private |
Обновляет текущее положение точки на окружности

|
private |
Обновляет текущее положение точки на линии

|
inline |
| void gui::FlyingRobot::SetTrajectory | ( | gui::Trajectory * | trj | ) |

|
private |
Обновляет поля curr_angle_on_circle_, clockwise_ и distribution_of_angle_.

|
private |
Обновляет поля cos_of_line_ и sin_of_line_.

|
private |
Берет следующий Segment, обновляя приватные поля

|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |