5 : QMainWindow(parent),
6 ui(
new Ui::MainWindow),
11 ui->plotSettingsDockWidget->setVisible(
false);
12
13 ui->plot->setInteractions(QCP::iRangeDrag | QCP::iRangeZoom |
14 QCP::iSelectPlottables | QCP::iSelectItems);
15
16 connect(
ui->plot, &QCustomPlot::mousePress,
this,
18
19 connect(
ui->plot->xAxis, SIGNAL(rangeChanged(QCPRange)),
this,
21
22 connect(
ui->plot->yAxis, SIGNAL(rangeChanged(QCPRange)),
this,
24
27
29
31 ui->targetInfoTableWidget,
ui->hillInfoTableWidget,
32 ui->trappyCircleInfoTableWidget,
ui->trappyLineInfoTableWidget);
33
35 ui->targetRemovePushButton,
ui->hillRemovePushButton,
36 ui->trappyCircleRemovePushButton,
ui->trappyLineRemovePushButton);
37
39
40 QIntValidator* int_validator{new QIntValidator()};
41 int_validator->setRange(1, 9);
42 ui->robotsAmountLineEdit->setValidator(int_validator);
43
44 connect(
ui->plotSettingsDockWidget, &QDockWidget::visibilityChanged,
this,
45 [this](bool visible) {
46 if (is_drown_trajectory_)
47 ui->flyRobotPushButton->setEnabled(!visible);
48 });
49}
void SetUntitledFile()
Нужно для того, чтобы при открытии приложения менялось имя "Untitled" файла, так как может быть такое...
Definition new.cpp:8
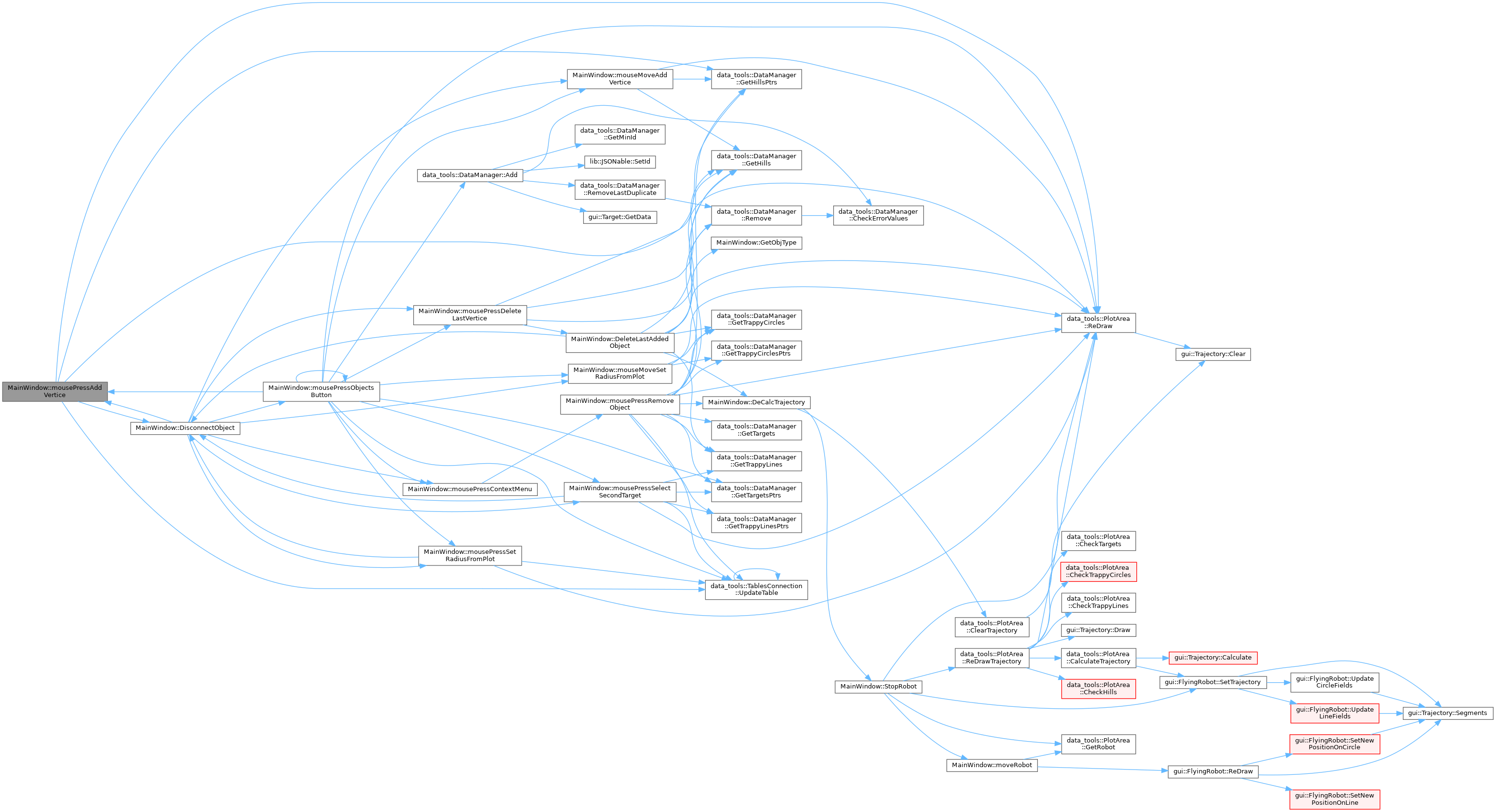
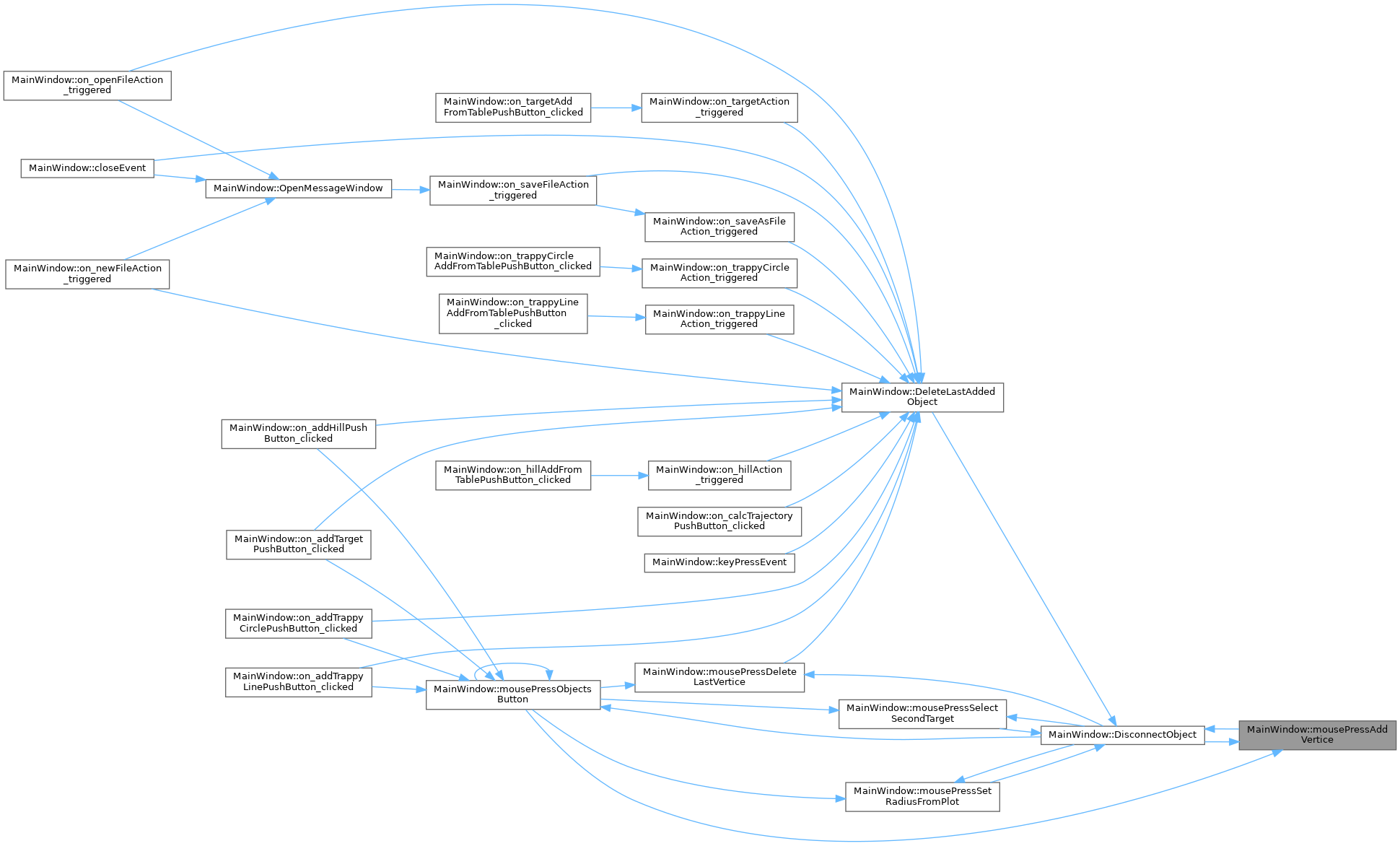
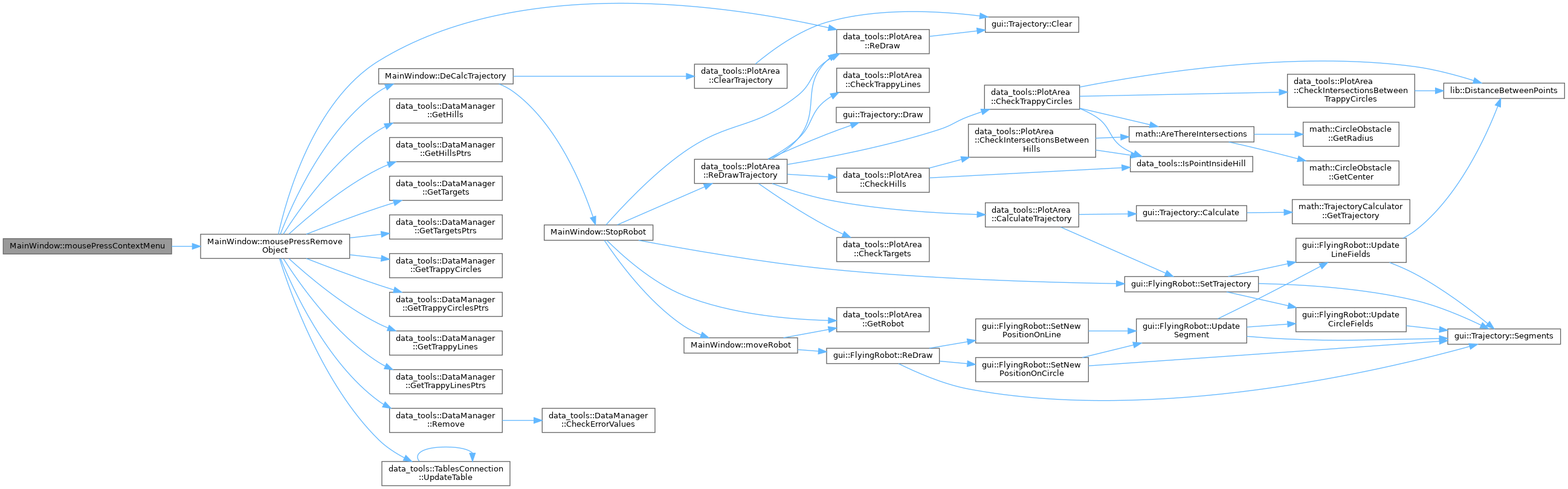
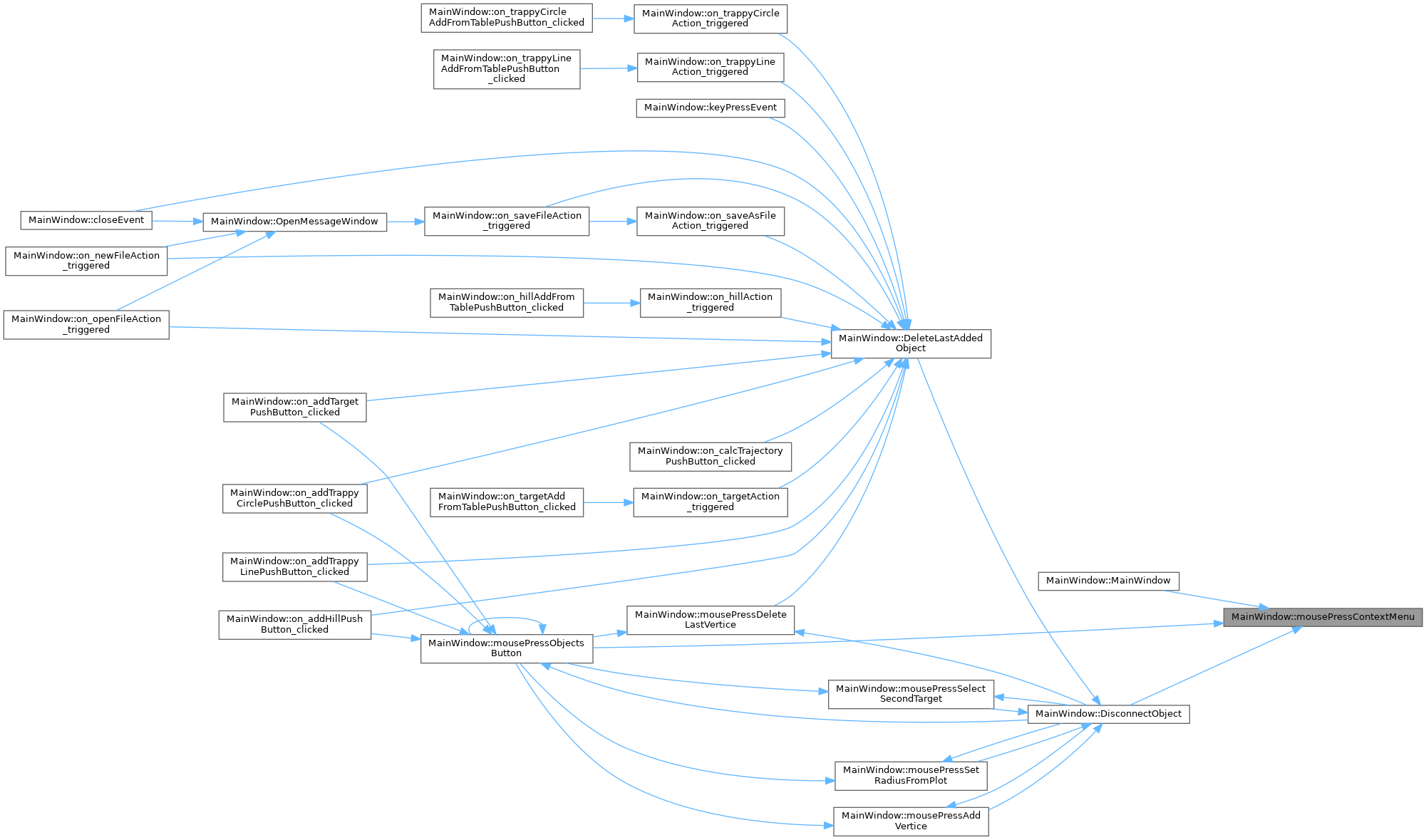
void mousePressContextMenu(QMouseEvent *mouse_event)
Definition other_connections.cpp:174
std::unique_ptr< data_tools::PlotArea > area_
Definition mainwindow.h:113
std::unique_ptr< data_tools::DataManager > manager_
Definition mainwindow.h:114
Ui::MainWindow * ui
Definition mainwindow.h:110
void on_yAxis_rangeChanged(QCPRange range)
Definition other_connections.cpp:106
void on_xAxis_rangeChanged(QCPRange range)
Definition other_connections.cpp:86
GuiJsonFile json_file_
Definition mainwindow.h:117
std::unique_ptr< data_tools::TablesConnection > t_connection_
Definition mainwindow.h:115